For the past 6 years, SD Robotics 101 has iteratively improved on its cube-shaped design, adding features with each iteration of Cubeception. 2018-2019 has been our biggest year yet, with the addition of a neural-network powered computer vision module and greatly improved navigation stability. Communication between the main vehicle and the minisub have also been established, augmenting the capability of the team to parallelize tasks in both development and the competition.

Cubeception 3 is designed with modularity in mind, featuring the replacement of the outer frame with pylons and improved thrusters, a two-chambered hull for easier access to the batteries, a raspberry pi cluster for parallel computing, and the addition of sonar and computer vision capability for intelligent navigation and task recognition.
Our smaller sub is equipped with computer vision, and is capable of performing tasks like locating/touching buoys and surfacing in areas.
Awards:
* Finalist
* Partnership Award


Cubeception 2 features significantly better waterproofing, higher processing power, a removable electronics core, foolproof wiring, and easier maintainance over its predecessor. A heavy emphasis was placed on affordability with Cubeception 2, so several parts such as the connectors, pressure sensor mount, and thruster focusers were 3D printed.
Awards:
* Semifinalist
* Innovation on a Budget Award
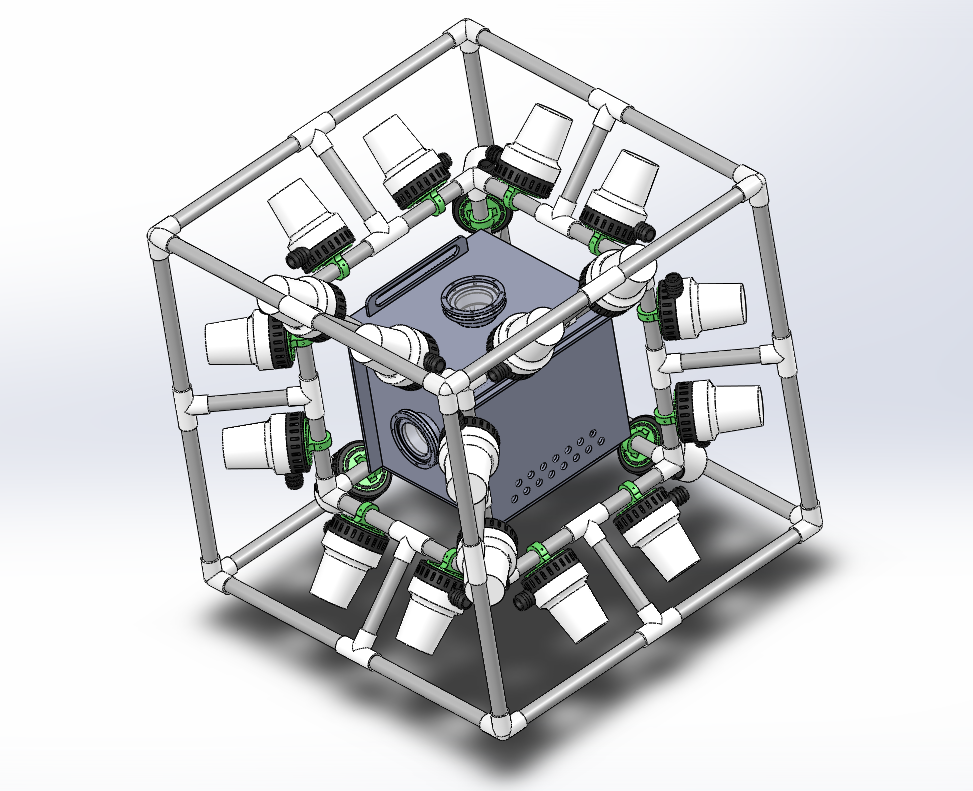
Cubeception 1 featured a unique 9 inch cube-shaped core surrounded by a 2 foot cube-shaped PVC frame with 24 bilge pumps mounted on it. The main core also contained portholes for a forward Raspberry Pi camera as well as a downward webcam. The bilge pump mounts, experimental torpedoes, and thruster extensions were 3D printed, providing affordable optimizations.